




Il recente lavoro del College of Engineering della Cornell University amplia le conoscenze sulle strategie per il controllo dei movimenti nei soft robot costituiti da attuatori fluidi in elastomero.
Quando parliamo di soft robotics e di adattamento all’ambiente, il riferimento è agli attuatori cosiddetti “fluidici” – ossia costituiti da una camera d’aria gonfiata mediante un fluido in pressione – e, più in particolare, agli attuatori fluidici in polimero allo stato gommoso (elastomero), utilizzati nella progettazione di soft robot per la loro morbidezza e, al contempo, robustezza, per la loro semplicità di fabbricazione, ma soprattutto per la loro grande capacità di deformazione e di adattamento passivo alle perturbazioni esterne, nonostante i design minimalisti.
«La chiave del successo degli attuatori fluidici in elastomero è data dalla loro morfologia intelligente, che consente deformazioni complesse e multifunzionali senza segnali di controllo espliciti. Per un più elevato grado di versatilità, tuttavia, tali meccanismi soft minimali possono integrare architetture di controllo sofisticate»
spiegano gli autori dello studio dal titolo “Harnessing Nonuniform Pressure Distributions in Soft Robotic Actuators”, a cura del College of Engineering della Cornell University (stato di New York), pubblicato su Advanced Intelligent Systems il 20 gennaio 2023.
Negli ultimi anni, la ricerca in questo settore ha mostrato nuove modalità di controllo minimalista sui soft robot costituiti da attuatori fluidici in elastomero, ad esempio impiegando valvole azionate da pressione per produrre oscillazioni oppure intervenendo sulla viscosità del fluido interno, al fine di ottenere la curvatura degli attuatori.
E tutto questo affinché, attraverso deformazioni più complesse e articolate, i robot morbidi possano raggiungere un più elevato livello di flessibilità e di adattabilità nell’ambito di quelle applicazioni (terrestri o acquatiche) che prevedono, ad esempio, l’esplorazione di ambienti critici come lo spazio e l’oceano.
Nonostante, però, questi progressi – osserva il team della Cornell University – il campo della soft robotics deve ancora dimostrare profili di attuazione complessi per mezzo di circuiti di azionamento pratici, «alla pari degli infiniti gradi di libertà passivi che sono il segno distintivo degli attuatori morbidi».
Con l’obiettivo di colmare tale lacuna, nel lavoro citato gli autori presentano un set di strumenti col quale sfruttare il potenziale dell’interazione tra la tipologia di fluido dell’attuatore e la struttura interna ai robot morbidi, per generare complesse deformazioni spaziotemporali, «irraggiungibili senza un ampio controllo esterno» [per approfondimenti sulla soft robotics, consigliamo la lettura della nostra guida al futuro della robotica, che ne spiega gli indirizzi e le applicazioni – ndr]. Vediamo insieme che cosa ne è emerso.
Soft robotics e adattamento all’ambiente: quadro teorico per un modello di interazione tra fluido e struttura
In tema di soft robotics e adattamento all’ambiente, in sostanza, quello che il gruppo di ricerca ha tentato di fare non è stato incorporare nuove funzionalità nel materiale utilizzato – ossia l’elastomero – quanto focalizzarsi sul modo in cui il fluido in pressione di cui è costituito l’attuatore interagisce con quel materiale.
In particolare, è stato formulato il quadro teorico per un modello di interazione fluido-struttura che descrive le dinamiche dei robot morbidi guidati da fluidi viscosi. Modello che ha lo scopo di fornire informazioni sui meccanismi di tali sistemi, oltre che uno strumento pratico di progettazione.
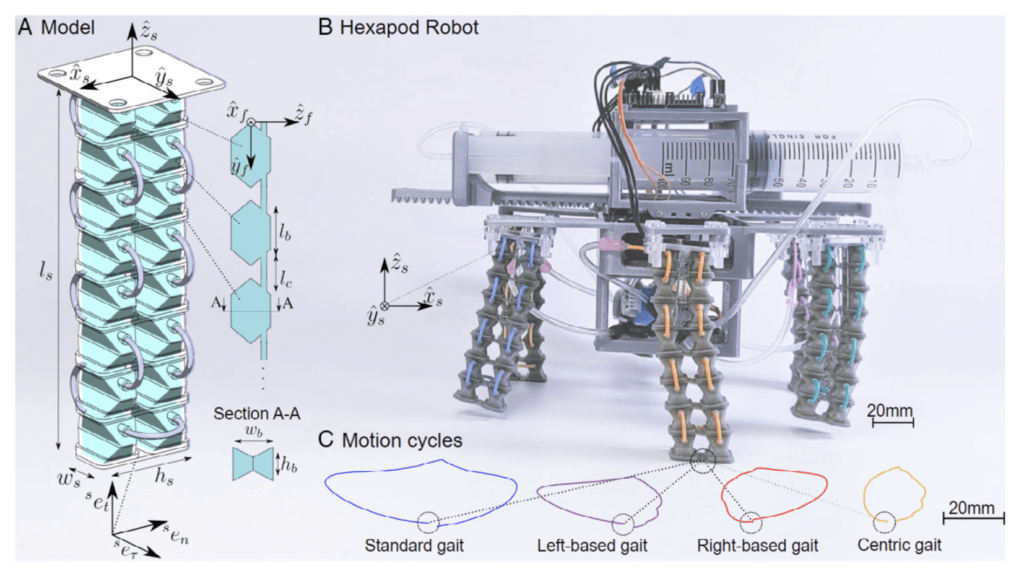
«Ci siamo concentrati su una cella unitaria semplificata, tipica degli attuatori fluidici in elastomero, vale a dire una serie di sedici soffietti elastomerici con tubi sottili riempiti di fluido viscoso e disposti simmetricamente attorno a un piano neutro» fanno sapere i ricercatori.
Tale configurazione consente movimenti antagonisti, ovvero «uno che tira e uno che spinge»: i minuscoli tubi inducono, infatti, viscosità, facendo sì che la pressione venga distribuita in modo non uniforme, piegando l’attuatore in diversi schemi di movimento.
Il modello descrittivo sviluppato è in grado di prevedere i possibili movimenti dell’attuatore, il tutto con un singolo input di fluido. Questo si traduce in un attuatore capace di esercitare movimenti molto più complessi, ma senza i molteplici input e il controllo di feedback richiesti dai metodi precedenti.
Dalla teoria alla pratica: la dimostrazione dei nuovi schemi di movimento dell’attuatore
Al fine di testare la tecnologia e il metodo messi a punto, il team di studio in tema di soft robotics e adattamento all’ambiente ha costruito un soft robot a sei zampe, con due pompe a siringa in cima, in grado di camminare a 0,05 lunghezze al secondo e di accovacciarsi.
Nel dettaglio, sono stati identificati cinque meccanismi di movimento attraverso arti robotici guidati dal flusso viscoso: la connettività rettilinea produce un movimento ampio, mentre un singolo incrocio di connessioni produce cicli più stretti; allo stesso modo, il profilo dell’attuatore durante tutto il ciclo di movimento è diverso, così come l’inclinazione della punta dell’attuatore.
«In un’andatura da robot con le gambe, il movimento potrebbe essere equiparato rispettivamente a passi da struzzo e a trotto da elefante. Sebbene la traiettoria della punta dell’attuatore possa apparire qualitativamente simile, la differenza di curvatura durante il ciclo di movimento nell’attuatore fluidico in elastomero causa angoli della punta significativamente diversi» specificano gli autori.
In sintesi, i test hanno mostrato un buon accordo tra il modello predittivo dell’interazione fluido viscoso-struttura e le curve sperimentali del comportamento dinamico dell’attuatore.
Il modello, nel dettaglio, prevede l’estensione iniziale entro il 2,8% e il 3,2% dell’estensione effettiva nella configurazione diritta e incrociata e la deflessione orizzontale massima entro il 4,7% e il 12,6% della deflessione effettiva, rispettivamente per la configurazione diritta e incrociata, fa notare il team.
Soft robotics e adattamento all’ambiente: la ricerca futura
In tema di soft robotics e di adattamento all’ambiente, l’attuatore fluidico in elastomero ideato dal gruppo di lavoro guidato dalla Cornell University potrebbe trovare applicazione nell’ambito dell’utilizzo di dispositivi quali, ad esempio, i bracci robotici. Anche se – commentano gli autori – c’è ancora molto studio da svolgere.
Per il momento, è stata dettagliata la parte teorica e sono stati sperimentati i cinque meccanismi principali per la generazione di nuovi moti complessi negli attuatori fluidici:
- la distribuzione spaziale dei soffietti collegati
- il rapporto di scala temporale solido/fluido
- il rapporto di scala temporale visco-elastico/input
- la pressione-propagazione diffusiva del campo
- la pressione relativa iniziale
L’utilità di quanto dimostrato in laboratorio ha visto protagonista un mini soft robot a sei zampe guidate da fluidi viscosi, capaci di raggiungere una velocità pari a quella dei soft robot provvisti di gambe morbide.
«In sintesi, abbiamo dimostrato che, negli attuatori fluidici in elastomero, le distribuzioni di pressione viscose e non uniformi in tutto il corpo dell’attuatore possono essere sfruttate per produrre movimenti spaziotemporali intercambiabili e complessi» concludono i ricercatori
Il lavoro futuro, però – fanno notare – dovrà andare oltre il funzionamento ad “anello aperto” dell’attuatore, per concentrarsi sull’accoppiamento bidirezionale tra attuatore e fluido e consentire, così, anche il controllo ad anello chiuso.
In futuro, un set di strumenti composto da cinque meccanismi principali di movimento, coniugati in tre scale temporali per input, tipologia di fluido e tipologia di attuatore, «rappresenterà la chiave di volta nella progettazione di robot morbidi dotati di più abilità e capaci di sfruttare appieno i loro infiniti gradi di libertà».
![Particolare di una catena di unità robotiche messe a punto dai ricercatori dell’Università di Amsterdam, ciascuna composta da un rotore posto sopra un motore elettrico [Credit: “An endless domino effect” - Università di Amsterdam - https://www.uva.nl/en/shared-content/subsites/institute-of-physics/en/news/2024/03/an-endless-domino-effect.html].](https://tech4future.info/wp-content/uploads/2024/04/solitoni-topologici-metamateriali-robotici-2024-343x198.webp)


![Fotografia che ritrae, da sinistra, la parte esterna e la parte interna dei guanti per interazioni tattili, con sensori tattili e attuatori vibrotattili (evidenziati dai riquadri) integrati [Credit: “Adaptive tactile interaction transfer via digitally embroidered smart gloves” - Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology - https://www.nature.com/articles/s41467-024-45059-8].](https://tech4future.info/wp-content/uploads/2024/03/guanti-per-interazioni-tattili-finalizzate-apprendimento-343x248.png)
